


 IQQA®- Guide
IQQA®- Guide
 Senhance® Surgical System
Senhance® Surgical System
 Navient Cranial
Navient Cranial
 Navient ENT
Navient ENT
 RuiXin Vascular Robot
RuiXin Vascular Robot
 Planmeca Viso
Planmeca Viso
 Planmeca ProMax 3D
Planmeca ProMax 3D
 磁共振成像导航微创介入治疗系统
磁共振成像导航微创介入治疗系统
 VOXEL-MAN Tempo
VOXEL-MAN Tempo
 VOXEL-MAN Sinus
VOXEL-MAN Sinus
 VOXEL-MAN Dental
VOXEL-MAN Dental
 ActivSight™ Intelligent Light
ActivSight™ Intelligent Light
 DEXIS intraoral scanners
DEXIS intraoral scanners
 Quantum Surgical
Quantum Surgical
 visor2
visor2
 ROBIO® EX
ROBIO® EX
 BLU-IGS
BLU-IGS
 ROBIN
ROBIN
 口腔种植手术导航系统
口腔种植手术导航系统
 DentRobot 口腔种植手术导航定位系统
DentRobot 口腔种植手术导航定位系统
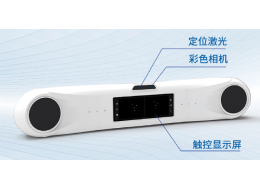 OP-M620近红外光学定位系统
OP-M620近红外光学定位系统
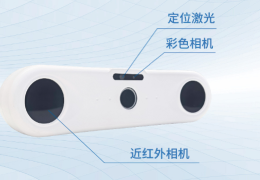 OP-M311光学定位系统
OP-M311光学定位系统
 电磁定位系统 MAGPILOT
电磁定位系统 MAGPILOT
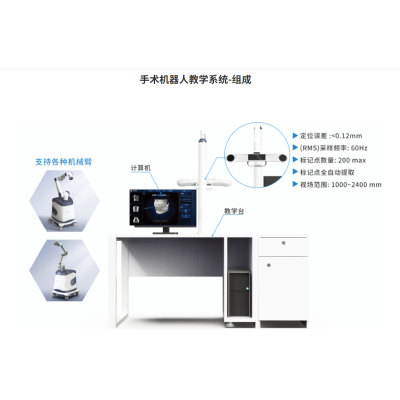
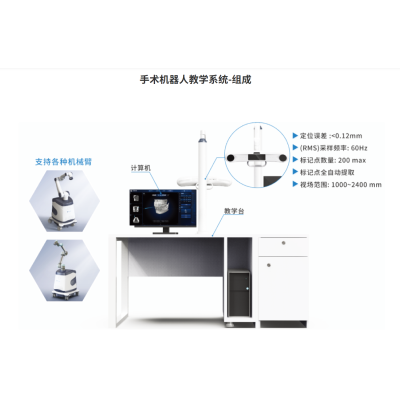
 手术机器人教学系统
手术机器人教学系统
 手术机器人科研系统
手术机器人科研系统